Hex HereFlow Optical Flow Sensor¶
The HereFlow optical flow sensor is a lightweight optical flow sensor including a short range lidar which uses the CAN protocol to communicate with the flight controller. This can be used to improve horizontal position control especially in GPS denied environments.
Support for this sensor is available in Copter-3.7.0 (and higher)
Where to Buy¶
The sensor is available from Hex resellers
Connection to Flight Controller¶
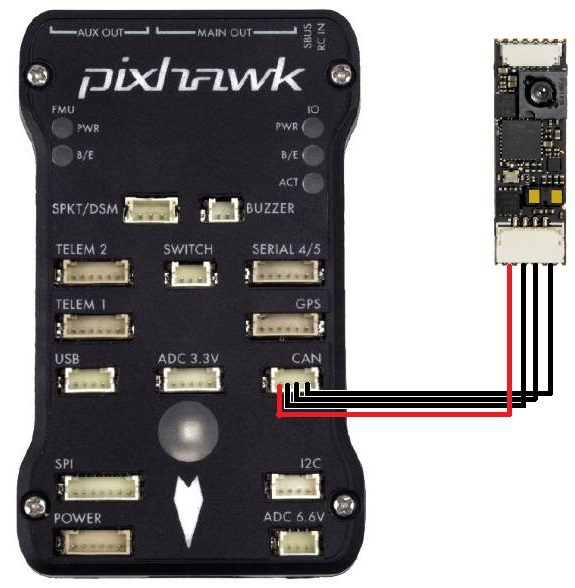
- The flow sensor should be mounted on the underside of the copter with the camera lens pointing downwards. The side of the sensor with the lens should be towards the front of the vehicle. The image above is incorrect because the flight controller’s arrow is pointing down while the sensor’s “V2.0” label is close to the top.
- Connect the sensor to the flight controllers’ CAN port (if using a Cube note that pre-Apr 2019 boards have CAN1 and CAN2 swapped)
- Set FLOW_TYPE = 6 (UAVCAN)
- Set CAN_P1_DRIVER = 1 to enable UAVCAN
- Set RNGFND1_TYPE = 24 (UAVCAN)
- Set RNGFND1_MAX_CM = 300 to set range finder’s maximum range to 3m
Additional Notes¶
- As with the PX4Flow sensor a range finder is required to use the sensor for autonomous modes including Loiter and RTL
- FlowHold does not require the use of a rangefinder