Motor Thrust Scaling¶
Copter includes motor thrust scaling which compensates for the non-linear thrust output of most ESCs and motors.
Tip
The default curve should work for nearly all ESC/motor combinations. Normally the parameters should not be adjusted unless the vehicle’s actual thrust curve has been measured.
Note
Motor thrust scaling was introduced in Copter 3.3.
Thrust Curves¶
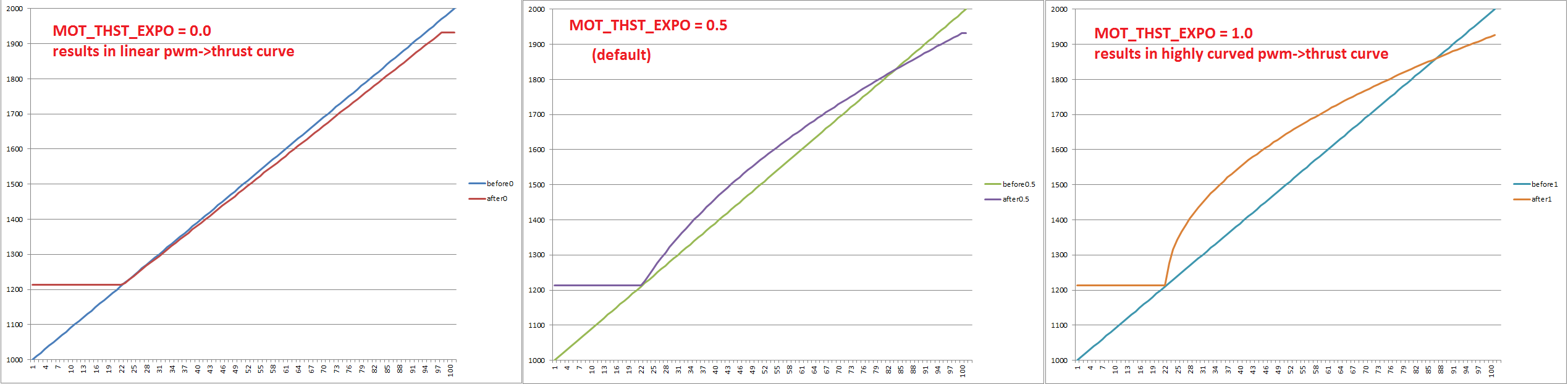
The curve is controlled by two parameters:
- MOT_THST_EXPO controls the shape of the thrust curve with “0” meaning a completely linear curve and “1.0” being very curved (see pictures below). The default is “0.65” (the image below incorrectly states the default is 0.5).
- MOT_THST_MAX controls the point at which the thrust flattens out near it’s maximum. By default this is 0.95 meaning 95% of full throttle.
Thrust Stands¶
The thrust stands listed below can be used to measure the PWM signal vs thrust output for a vehicle’s specific motor, esc and battery
MatLab example code¶
This MatLab example code can be used to calculate the appropriate value
for MOT_THST_EXPO based on measured thrust values.
Fill in the thrust array with the actual measured thrust values from
the vehicle. When Run, the MOT_THST_EXPO value will be printed.
throttle_pwm = [1000; 1100; 1200; 1300; 1400; 1500; 1600; 1700; 1800; 1900; 2000];
thrust = [0; 68.9; 203.1; 441.0; 785.8; 1177.3; 1655.0; 2118.8; 2673.0; 3153.8; 3490.2];
% Set MOT_THST_MAX to 90% to remove saturated top end
working_range = 1:9;
thrust = thrust(working_range);
% Normalise the throttle and thrust
throttle_normalised = (throttle_pwm(working_range) - min(throttle_pwm(working_range)))./(max(throttle_pwm(working_range))-min(throttle_pwm(working_range)));
thrust_normalised = thrust./max(thrust);
% Perform a least squares fit to solve for a in thrust = (1-a)*throttle + a*throttle^2
mdl = @(a,x)((1-a(1))*x + a(1)*x.^2);
startingVals = [0.5];
coefEsts = nlinfit(throttle_normalised, thrust_normalised, mdl, startingVals);
disp(['MOT_THST_EXPO is : ', num2str(coefEsts)]);
figure(2)
hold on;
plot(throttle_normalised, thrust_normalised, '*');
xgrid = linspace(0,1,100);
line(xgrid, mdl(coefEsts, xgrid), 'Color','g','LineWidth',4);
xlabel('Normalised Throttle');
ylabel('Normalised Thrust');