BlueRobotics Ping Underwater Sonar¶
The BlueRobotics Underwater Sonar is a single-beam encosounder with a maximum range of 30m, a beam width of 30deg and a maximum depth rating of 300m. More details can be found in the Technical Details section of the product page on BlueRobotics
Note
Support for this sensor is available in Rover-4.0.0 (and higher)
Where to Buy¶
- This sensor can be purchased directly from BlueRobotics
- Optionally the BLUART USB to Serial RS485 adapter allows connecting the sensor to a PC for testing
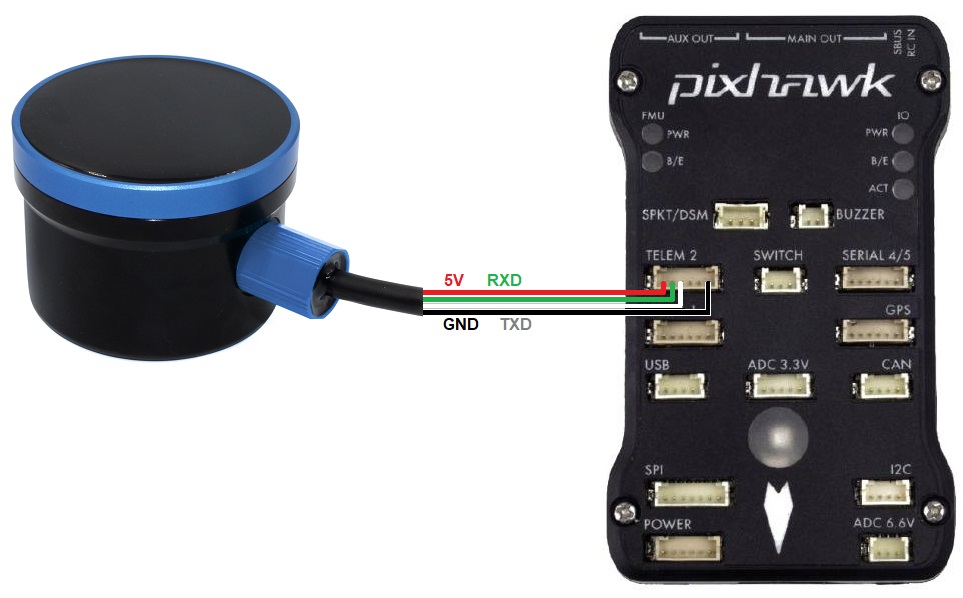
Connecting to the Flight Controller¶
For a serial connection you can use any spare Serial/UART port. The diagram below shows how to connect to SERIAL2.
If the SERIAL2 port on the flight controller is being used then the following parameters should be set:
- SERIAL2_PROTOCOL = 9 (Lidar)
- SERIAL2_BAUD = 115 (115200 baud)
- RNGFND1_TYPE = 23 (BlueRoboticsPing)
- RNGFND1_MIN_CM = 30
- RNGFND1_MAX_CM = 2600. This is the distance in centimeters that the rangefinder can reliably read.
- RNGFND1_ORIENT = 25 (down) if mounted on a boat
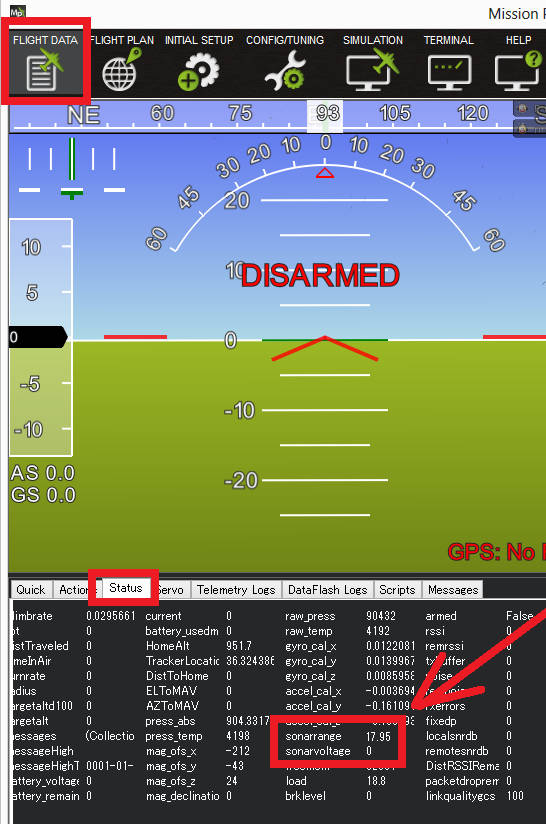
Testing the sensor¶
Distances read by the sensor can be seen in the Mission Planner’s Flight Data screen’s Status tab. Look closely for “sonarrange”.