Safety Switch¶
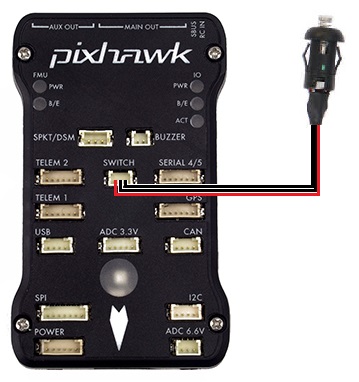
A safety switch can be used to enable/disable the outputs to motors and servos.
LED meaning¶
- Constant blinking - system is initialising
- Intermittent blinking - system is ready. press the safety switch to enable output to the motors.
- Solid - safety switch has been pressed, motors and servos are able to move once the vehicle is armed.
Configuring the Safety Switch¶
- BRD_SAFETYENABLE = 0 to disable the switch
- BRD_SAFETY_MASK can be used to set which individual channels are enabled/disabled with the safety switch

Using the Safety Switch to force I/O board firmware update¶
If the safety switch is held down for the first few seconds after a Pixhawk is powered up, the I/O firmware is reloaded.
This is normally not required but in some rare cases is required after a firmware upload if you hear the “Start up Failed” sound after startup (see Sounds wiki page).
Note
A Pixhawk has two CPUs, the main CPU (aka FMU) is where ArduPilot runs. There is a separate I/O CPU which is responsible for some I/O including PWM outputs to the MAIN OUT channels. Pixracers only have the main CPU.