UAVCAN ESCs¶
Copter, Plane and Rover support UAVCAN Electronic Speed Controllers (ESCs) that allow two-way communication with the flight controller enabling potentially easier setup and in-flight monitoring of ESC and motor health.
List of CAN ESCs¶
| Name | Avail | Ever Worked |
|---|---|---|
| Zubax Orel 20 | Yes | Yes |
| AutoQuad ESC32 | No | No |
| VESC | Yes | No (proposal) |
| HiEnd Can Bus ESC | Yes | ? |
| ESC Velocity | Yes | No |
Connecting to the Pixhawk¶
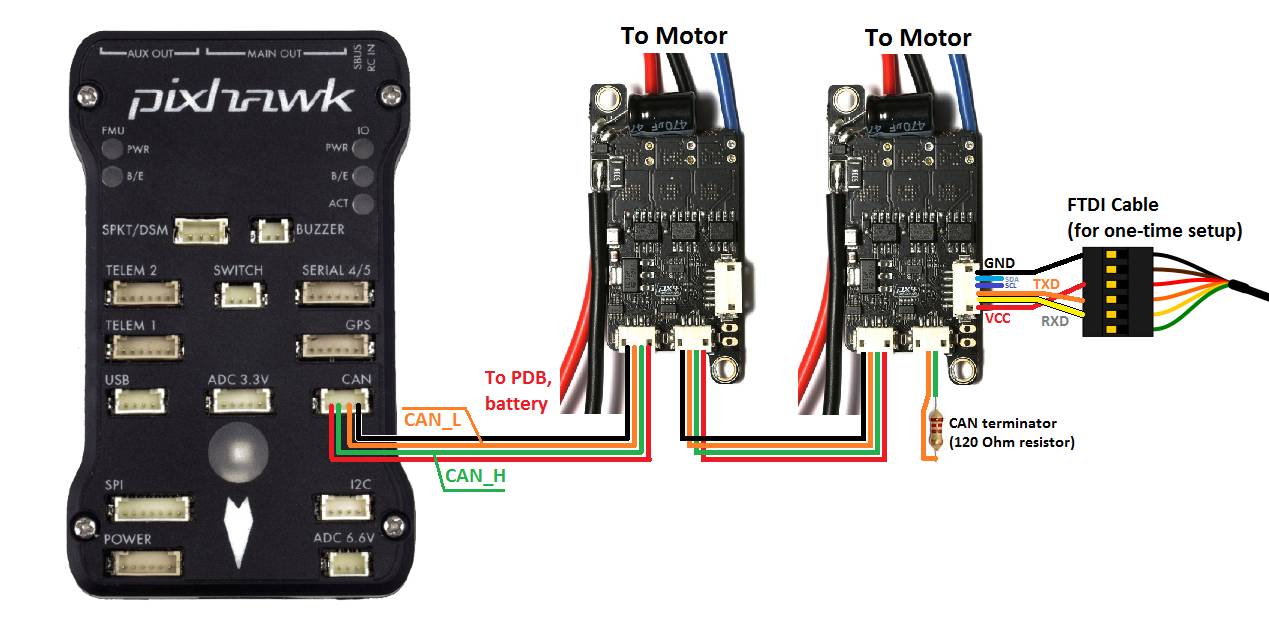
One ESC (it does not matter which) should be connected to the Pixhawk’s CAN port using a 4-pin DF13 to 4-pin UAVCAN adapter cable. Each subsequent ESC should be connected to the previous using a 4-pin UAVCAN cable. The final ESC should have a CAN bus terminator plugged into one of it’s 4-pin UAVCAN ports.
The FTDI Cable connection is only required for the one-time set-up discussed below.
Alternatively, the ESC can be configured via CAN bus using the UAVCAN GUI Tool.
ESC setup using CLI¶
Each ESC must go through a one-time manual setup using an FTDI cable to define it’s UAVCAN Node Id and motor number. In future versions of ArduPilot this will be replaced with a setup procedure using the mission planner (and other GCSs).
The steps required are:
- Connect the FTDI cable to the ESC’s “Developer port” as shown in the image above.
- Power the ESCs with a battery
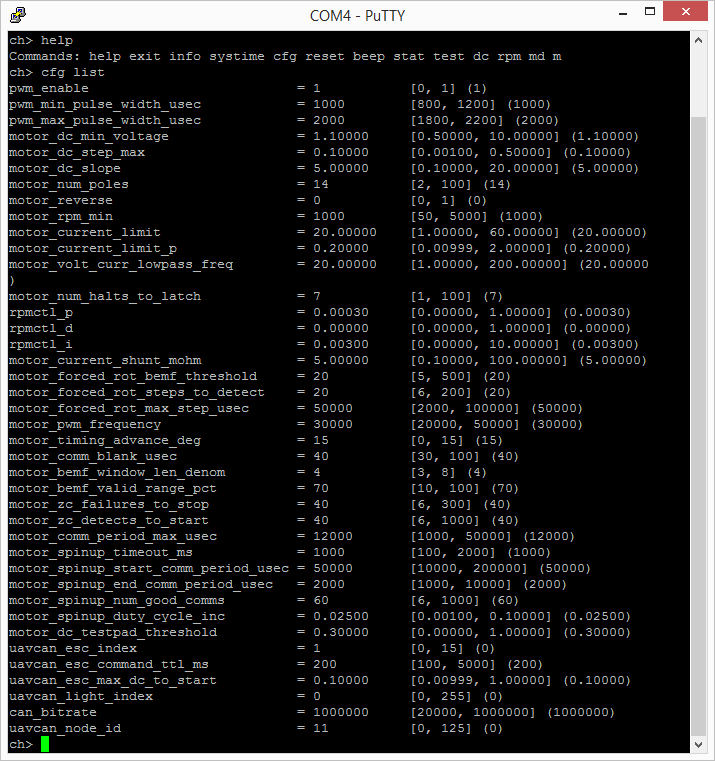
- Use a terminal program such as Putty to connect to the ESC using the FTDI cable’s COM port, using serial at 115200 baud
- press Enter into the terminal and a “ch>” prompt should appear
- type
cfg listto see a full list of parameters - on motor #1 (i.e. front-right on a quad) set the uavcan_node_id to
“10” and esc_index to “0” by typing:
cfg set uavcan_node_id 10cfg set esc_index 0cfg save(to save the configuration)reboot
- to test the motor moves:
dc arm(to enable the output)dc 0.2(to spin motor at 20%)dc(to stop motor)
- repeat for motors #2 (back left on a quad), #3, #4, etc with each motor having a node-id and index one higher than the previous (in fact the node-id doesn’t matter as long as it’s unique).
Additional information¶
Zubax Sapog wiki page, Sapog reference manual, and ESC firmware.