KDE CAN ESCs¶
KDECAN ESCs are high-end ESCs that allow control and feedback using a custom CAN protocol
Note
Support for these ESCs is included in Copter-3.7 (and higher), Plane-3.10 (and higher) and Rover-3.5 (and higher)
Where To Buy¶
- KDE-UAS125UVC and KDE-UAS85UVC can be purchased from KDEDirect.com (other KDE ESCs may also support CAN, check the images of the ESC, those with “CAN” written on the side should work).
- KDECAN Wire Kit is also required
Connection and Configuration¶
KDE’s instructions for connecting and configuring with ArduPilot are here
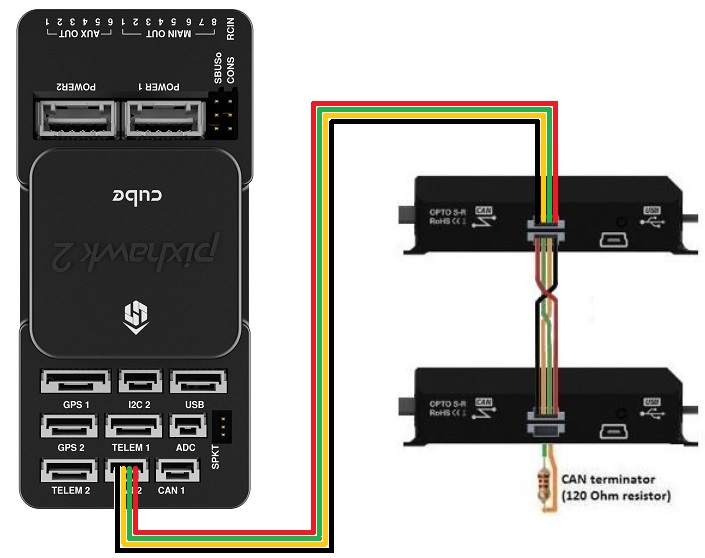
- ESCs should be daisy chained together using the KDECAN Wire Kit. One 4-pin CAN cable should be connected to the flight controller’s CAN port. The CAN terminator (the 4-pin connector with a black loop) should be connected to the last ESC in the chain
Warning
If using a Cube autopilot, the CAN1 and CAN2 labels are reversed. These instructions assume the ESCs are connected to the CAN1 port which is labelled “CAN2” on Cube autopilots
- Set CAN_D1_PROTOCOL = 2 (KDECAN)
- Set CAN_P1_DRIVER = 1 (First driver) to specify that the ESCs are connected to the CAN1 port
- Set MOT_PWM_MIN = 1000 and MOT_PWM_MAX = 2000 so ArduPilot uses an output range that matches the ESCs input range
- Set
SERVOx_MIN= 1000 andSERVOx_MAX= 2000 for each ESC connected (xcorresponds to the ESC number) so ArduPilot uses an output range that matches the ESCs input range