The Cube Overview¶

System Features¶
The Cube flight controller is a further evolution of the Pixhawk flight controller. It is designed for commercial systems and manufacturers who wish to fully integrate a flight controller into their system. On top of the existing features of Pixhawk, it has the following enhancements:
- 3 sets of IMU sensors for extra redundancy
- 2 sets of IMU are vibration-isolated mechanically, reducing the effect of frame vibration to state estimation
- IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
- The entire flight management unit(FMU) and inertial management unit(IMU) are housed in a reatively small form factor (a cube). All inputs and outputs go through a 80-pin DF17 connector, allowing a plug-in solution for manufacturers of commercial systems. Manufacturers can design their own carrier boards to suite their specific needs.
Specifications¶
- Processor
- 32-bit ARM Cortex M4 core with FPU
- 168 Mhz/256 KB RAM/2 MB Flash
- 32-bit failsafe co-processor
- Sensors
- Three redundant IMUs (accels, gyros and compass)
- InvenSense MPU9250, ICM20948 and/or ICM20648 as first and third IMU (accel and gyro)
- ST Micro L3GD20+LSM303D or InvenSense ICM2076xx as backup IMU (accel and gyro)
- Two redundant MS5611 barometers
- Power
- Redundant power supply with automatic failover
- Servo rail high-power (7 V) and high-current ready
- All peripheral outputs over-current protected, all inputs ESD protected
- Interfaces
- 14x PWM servo outputs (8 from IO, 6 from FMU)
- S.Bus servo output
- R/C inputs for CPPM, Spektrum / DSM and S.Bus
- Analogue / PWM RSSI input
- 5x general purpose serial ports, 2 with full flow control
- 2x I2C ports
- SPI port (un-buffered, for short cables only not recommended for use)
- 2x CAN Bus interface
- 3x Analogue inputs (3.3V and 6.6V)
- High-powered piezo buzzer driver (on expansion board)
- High-power RGB LED (I2C driver compatible connected externally only)
- Safety switch / LED
- Optional carrier board for Intel Edison
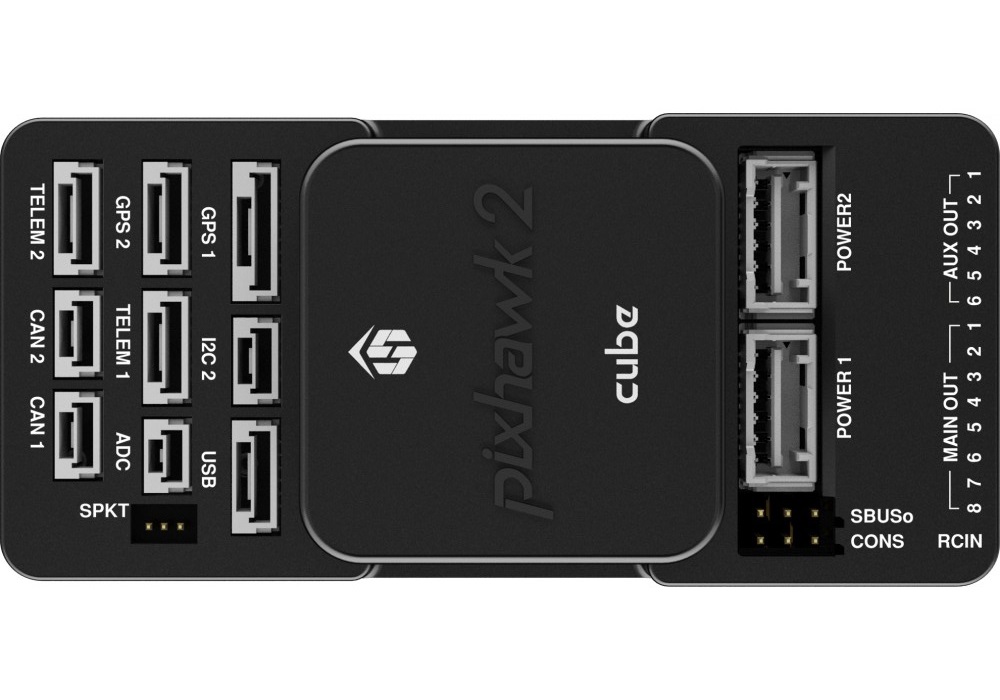
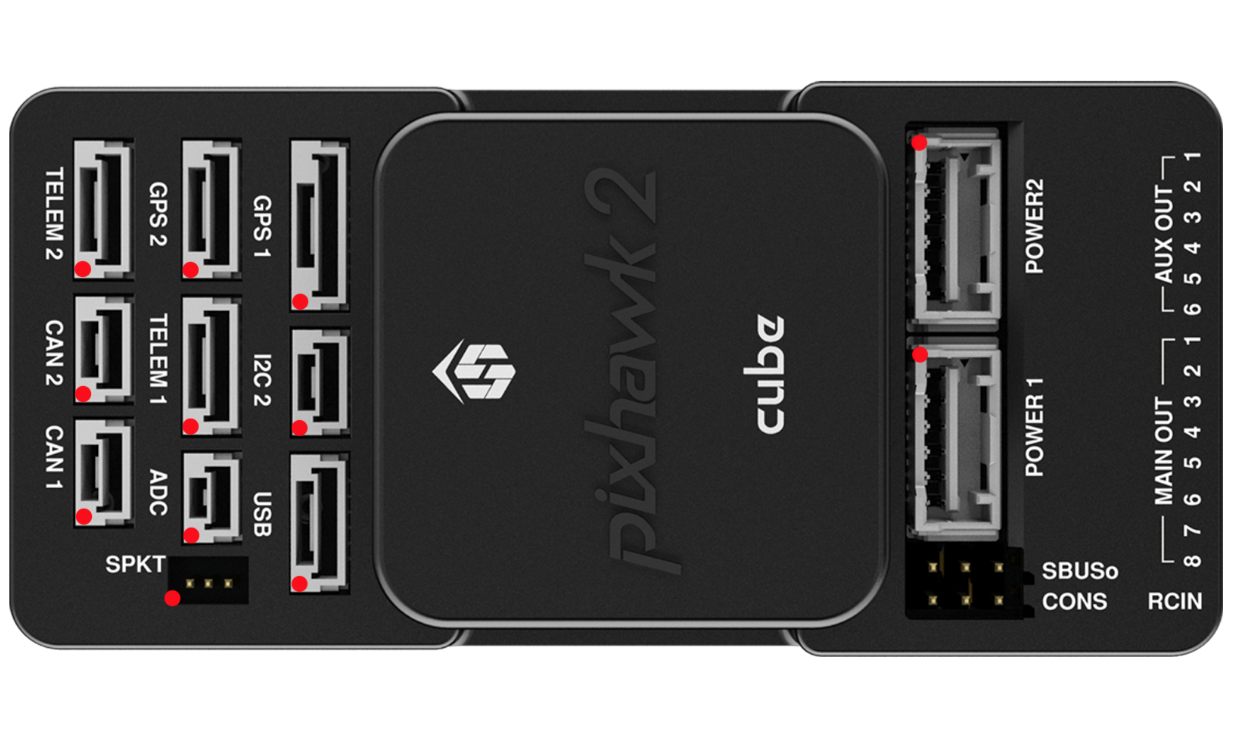
The Cube connector pin assignments¶
This section details the pin assignments of the standard carrier board of The Cube. There are other types of carrier boards available, please refer to the manufacturer pages for pinouts of specific carrier board.
TELEM1, TELEM2 ports
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS | +3.3V |
| 5 (blk) | RTS | +3.3V |
| 6 (blk) | GND | GND |
GPS1 port
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | SCL I2C1 | +3.3V |
| 5 (blk) | SDA I2C1 | +3.3V |
| 6 (blk) | Button | GND |
| 7 (blk) | button LED | GND |
| (blk) | GND | GND |
GPS2 port
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | SCL I2C2 | +3.3V |
| 5 (blk) | SDA I2C2 | +3.3V |
| 6 (blk) | GND | GND |
ADC
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | |
| 3 (blk) | GND | GND |
I2C2
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | SCL | +3.3 (pullups) |
| 3 (blk) | SDA | +3.3 (pullups) |
| 4 (blk) | GND | GND |
CAN1&2
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | CAN_H | +12V |
| 3 (blk) | CAN_L | +12V |
| 4 (blk) | GND | GND |
POWER1&2
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (red) | VCC | +5V |
| 3 (blk) | CURRENT | up to +3.3V |
| 4 (blk) | VOLTAGE | up to +3.3V | 5 (blk) | GND | GND | 6 (blk) | GND | GND |
USB
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | D_plus | +3.3V |
| 3 (blk) | D_minus | +3.3V |
| 4 (blk) | GND | GND |
| 5 (blk) | BUZZER | battery voltage |
| 6 (blk) | Boot/Error LED |
Quick Start¶
Use the Pixhawk Wiring QuickStart as a guide. The Cube update coming soon
More Information¶
see www.proficnc.com
The reference design files of the standard carrier board are available in github, this serve as a starting point for designers to design their own system based on The Cube flight controller.
More Images¶