Mateksys F405-STD and variants¶
the above images and some content courtesy of mateksys.com
Specifications¶
- Processor
- STM32F405RGT6 ARM (168MHz)
- Sensors
- ICM20602 IMU on STD version, MPU6000 on CTR version
- BMP280 barometer (STD and CTR)
- 184A Voltage & current sensor on CTR version
- Interfaces
- 5x UARTS
- 6x PWM outputs
- 1x RC input PWM/PPM, SBUS
- I2C port for external compass and airspeed sensor (STD, CTR and AIO)
- USB port
- Built-in OSD
- MicroSD slot
- Size and Dimensions
- 36x36mm PCB with 30.5mm mounting holes
- STD: 7g
- CTR: 10g
See mateksys.com for more detailed specifications and wiring diagrams.
Variants¶
In addition to STD and CTR versions, there are older variants called -AIO and -OSD that have been declared end-of-life by mateksys. Both use the ICM20602 IMU, like the STD version. Neither have an onboard barometer. While the -AIO has I2C pads exposed, the -OSD version does not.
Note
For the -STD version please use the MatekF405-STD type firmware. For the -CTR version with MPU6000 please use the MatekF405 type firmware. For the MatekF405-Wing which has an essentially different board layout please use the dedicated firmware. Please note that ArduPilot does not support -AIO and -OSD versions per default as additional hardware and / or software adjustments are required.
Default UART order¶
- SERIAL0 = console = USB
- SERIAL1 = Telemetry1 = USART3
- SERIAL2 = Telemetry2 = UART4
- SERIAL3 = GPS1 = USART1
- SERIAL4 = GPS2 = UART5
Serial protocols can be adjusted to personal preferences.
Where to Buy¶
- see this list of Mateksys Distributors
Connecting a GPS/Compass module¶
This board does not include a GPS or compass so an external GPS/compass should be connected as shown below in order for autonomous modes to function.
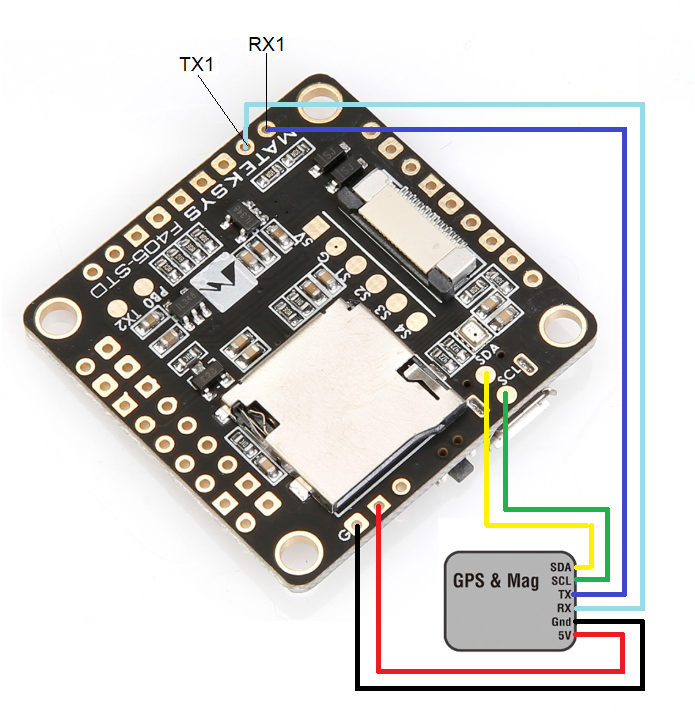
A battery must be plugged in for power to be provided to the 5V pins supplying the GPS/compass modules. USB power is not provided to peripherals.