Mateksys F405-Wing¶
the above image and some content courtesy of mateksys.com
Note
Support for this board is available with Copter-3.6.0 (and higher)
Specifications¶
- Processor
- STM32F405RGT6 ARM (168MHz)
- Sensors
- InvenSense MPU6000 IMU (accel, gyro)
- BMP280 barometer
- Voltage & current sensor
- Power
- 9V ~ 30V DC input power
- Interfaces
- 6x UARTS
- 9x PWM outputs (2 for motors, 7 for servos)
- 1x RC input PWM/PPM, SBUS
- I2C port for external compass and airspeed sensor
- USB port
- Built-in OSD
- Size and Dimensions
- 56mm x 36mm x 15mm
- 25g
See mateksys.com for more detailed specifications and wiring diagrams.
Default UART order¶
- SERIAL0 = console = USB
- SERIAL1 = Telemetry1 = USART1
- SERIAL2 = empty, USART2 used for RCInput
- SERIAL3 = GPS1 = USART3
- SERIAL4 = GPS2 = UART4
- SERIAL5 = USER = UART5
- SERIAL6 = USER = USART6
Serial protocols can be adjusted to personal preferences.
Dshot capability¶
All motor/servo outputs are Dshot and PWM capable. However, mixing Dshot and normal PWM operation for outputs is restricted into groups, ie. enabling Dshot for an output in a group requires that ALL outputs in that group be configured and used as Dshot, rather than PWM outputs. The output groups that must be the same (PWM or Dshot, when configured as a normal servo/motor output) are: 1/2, 3/4, 5/6, or 7/8/9.
Where to Buy¶
- see this list of Mateksys Distributors
Connecting a GPS/Compass module¶
This board does not include a GPS or compass so an external GPS/compass should be connected as shown below in order for autonomous modes to function.
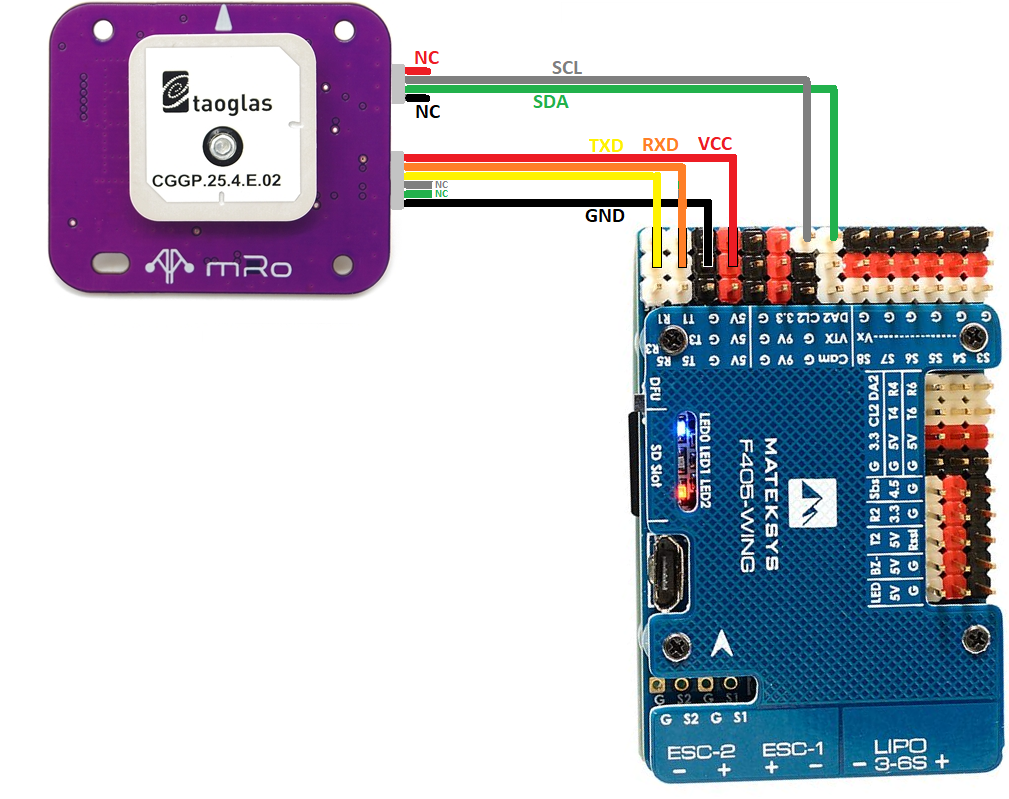
A battery must be plugged in for power to be provided to the 5V pins supplying the GPS/compass modules.