GCS Failsafe¶
This page covers the set-up and testing of the Ground Station Control (GCS) failsafe.
Note
Copter also supports other failsafes: Radio, Battery, and EKF / DCM Check.
Overview¶
The Ground Station Control (GCS) failsafe controls how Copter will behave if contact with the GCS is lost. Depending on the setting and vehicle position the failsafe will either RTL/LAND, or continue an active mission.
More specifically, if you have been using the GCS to control Copter (i.e. using a joystick) and then lose GCS contact for at least 5 seconds the following will happen:
- Disarm motors - if you are in stabilize or acro mode and your throttle is zero
- RTL - if you have a GPS lock and are more than 2 meters from your home position
- LAND - if you have no GPS lock or are within 2 meters of home
- Continue with the mission - if you are in AUTO mode and have set the GCS Failsafe Options to 2 (Enabled_continue_in_auto_mode).
If the failsafe clears (contact with the ground station is restored) Copter will remain in it’s current flight mode. It will not automatically return to the flight mode that was active before the failsafe was triggered. This means that if, for example, you are flying in stabilize mode when the failsafe is triggered, and this causes the flight mode to change to RTL or LAND, if you wish to re-take control of the copter you will need to set your flight mode again back to stabilize.
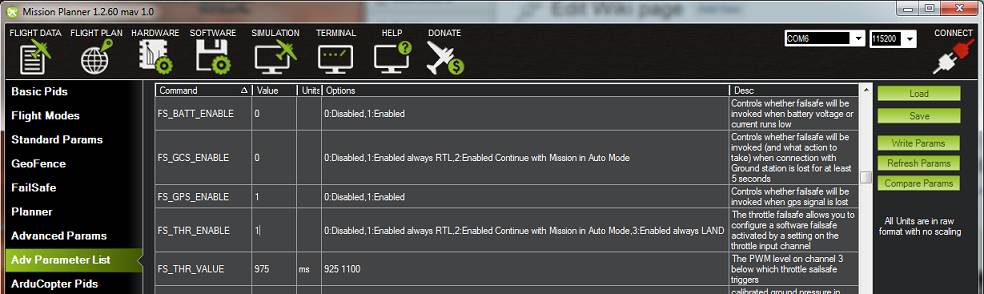
Setting the failsafe¶
In Mission Planner’s Advanced Parameter List, set the FS_GCS_ENABLE parameter to:
- 0 to disable the GCS failsafe
- 1 to enable and always RTL in event of loss of contact
- 2 to RTL unless in AUTO mode in which case we should continue with the mission
Note
All Failsafe Parameters can be observed or set from the Advanced Parameter List.