Traditional Helicopter – Tuning¶
This tuning guide is applicable to all versions of ArduCopter for traditional helicopters. However, it is written for Copter 3.4 and newer. Since the names of parameters, and scaling, were changed from Copter 3.3 to 3.4 the old tuning guide is archived here
For making setting changes to traditional helicopters, users are reminded to use only the Full or Complete Parameter List in your ground station software. Do not use the Basic, Extended or Advanced Tuning pages that are designed for multi-rotor aircraft. These pages will make unwanted setting changes to traditional helicopters. And remember to write the changes to the flight controller after making them or they won’t be saved!
General ArduCopter Flight Control Law Description¶
Users should generally understand the flight control laws before tuning. At a high level, the arducopter control laws are designed as a model following architecture where the software converts the pilot input into a commanded attitude (Stabilize Mode) or commanded rate (Acro mode) and controls the aircraft to achieve that commanded value. In the background, the software keeps track of, or predicts, where the aircraft should be in space (i.e. pitch and roll attitude) based on the inputs of the pilot or autopilot. It has two controllers (attitude and rate) that work together to ensure the actual aircraft is following the software’s predicted pitch and roll rates and attitudes.
The pilot’s commands are limited by the amount of acceleration that can be commanded through the ATC_ACCEL_P_MAX for pitch and ATC_ACCEL_R_MAX for roll. The initial responsiveness (crispness/sluggishness) of the aircraft to the pilot input can be adjusted through the ATC_INPUT_TC parameter (in AC 3.5 or earlier, this parameter was called RC_FEEL). The pilot input and these parameters are used to determine the requested rate required to achieve the desired response that is fed to the rate controller.
The attitude controller is used to ensure the actual attitude of the aircraft matches the predicted attitude of the flight controller. It uses the ATC_ANG_PIT_P in pitch and the ATC_ANG_RLL_P in roll to determine a rate that is fed to the rate controller that will drive the aircraft to the predicted attitude.
The rate controller receives the sum of the requested rate resulting from the pilot input and the rate from the attitude controller and determines the swashplate commands required to achieve the input rate. The rate controller uses a PID control algorithm and a feed forward path to control the aircraft and achieve the input rate. The feed forward path uses the input rate and applies the ATC_RAT_PIT_VFF gain for pitch and ATC_RAT_RLL_VFF gain for roll to determine its portion of the swashplate command. The PID algorithm uses the error between the actual rate and input rate to determine its portion of the swashplate command. These are summed and sent to the mixing unit where the servo positions are determined.
So this tuning method uses the VFF gain initially to ensure the requested rates match the actual rates. However the rates can vary from the requested due to disturbances. The P and D gains are then used to guard against disturbances that cause the actual rates to deviate from the requested rates. So the P and D gain may not be able to keep the actual rates exactly matching the requested rates. Since the software is tracking where the orientation of the aircraft should be, then any error between the requested and actual rates will result in attitude error. So there is a feature called the integrator that continually sums the rate errors which effectively calculates the error in attitude. The I gain is multiplied by the integrator and summed with the other outputs of the rate controller. The integrator is limited by the ATC_RAT_RLL_IMAX in roll and ATC_RAT_PIT_IMAX in pitch. When ground speed is less than 5 m/s, the integrator is leaked off (reduced at a specified rate) and another parameter, ATC_RAT_RLL_ILMI and ATC_RAT_PIT_ILMI, only lets it leak off so much. If the ILMI, or integrator leak minimum, is zero then the integrator will not be allowed to grow and the attitude will not be driven to exactly match the software’s predicted attitude. However, if this is non zero or large enough for attitude errors that may be encountered at low speeds and in a hover, then the actual attitude will track the predicted attitude. The reason for the leak and ILMI parameter is that a larger amount of integrator is needed for forward flight. However, in a hover and in particular during air ground transition, allowing large amounts of integrator can cause the aircraft to flip itself on its side. So the integrator leak along with the leak minimum parameter keep enough of the integrator to make it effective in keeping the attitudes matching but not so powerful to cause the aircraft to roll over.
Initial Setup of Pitch and Roll Tuning Parameters¶
Below are the initial parameters values that should be used to start the tuning of your helicopter. Use the suggested parameters in the yaw section below for the tail. The helicopter will be easily controllable with just the VFF set to 0.15 on pitch and roll in the event that you need to modify the tail settings from the defaults.
| ATC_ACCEL_P_MAX | 110000 |
| ATC_ACCEL_R_MAX | 110000 |
| ATC_ANG_PIT_P | 4.5 |
| ATC_ANG_RLL_P | 4.5 |
| ATC_RAT_PIT_D | 0 |
| ATC_RAT_PIT_FILT | 20 |
| ATC_RAT_PIT_I | 0 |
| ATC_RAT_PIT_ILMI | 0 |
| ATC_RAT_PIT_IMAX | 0.40 |
| ATC_RAT_PIT_P | 0 |
| ATC_RAT_PIT_VFF | 0.15 |
| ATC_RAT_RLL_D | 0 |
| ATC_RAT_RLL_FILT | 20 |
| ATC_RAT_RLL_I | 0 |
| ATC_RAT_RLL_ILMI | 0 |
| ATC_RAT_RLL_IMAX | 0.40 |
| ATC_RAT_RLL_P | 0 |
| ATC_RAT_RLL_VFF | 0.15 |
| ATC_INPUT_TC | 0.15 |
Tuning the Yaw Axis (Rudder)¶
It is recommended to make sure the tail functions properly before proceeding with tuning pitch and roll.
Important Note - UAV helicopters, as opposed to sport helicopters, will usually be running low headspeed and higher disc loading. With a mechanically driven tail this also means lower than normal tail speed and reduced tail authority. If your helicopter meets this description, it is recommended to set ATC_RAT_YAW_VFF to 0.05 before the first test hover.
Below are the current default settings for yaw. Spool up the heli and hover it no more than .25 meters above ground in Stabilize flight mode and test the starting tail settings. If the tail seems “loose” and doesn’t want to hold increase the ATC_RAT_YAW_P. If the tail rapidly shakes side to side reduce the ATC_ANG_YAW_P.
In all cases it is not recommended to adjust ATC_ANG_YAW_P below 3.5 or ATC_RAT_YAW_P above 0.38. If your helicopter cannot seem to achieve a solid tail within those limits you likely have a mechanical problem with the tail - either excessive “slop” or play in the linkage, binding of the linkage or a servo problem. Correct the problem before proceeding with roll and pitch tuning.
| ATC_ACCEL_Y_MAX | 27000 |
| ATC_ANG_YAW_P | 4.5 |
| ATC_RAT_YAW_D | 0.003 |
| ATC_RAT_YAW_FILT | 20 |
| ATC_RAT_YAW_I | 0.12 |
| ATC_RAT_YAW_ILMI | 0 |
| ATC_RAT_YAW_IMAX | 0.33 |
| ATC_RAT_YAW_P | 0.18 |
| ATC_RAT_YAW_VFF | 0.024 |
Setting VFF and ACCEL_MAX for Desired Pitch and Roll Response¶
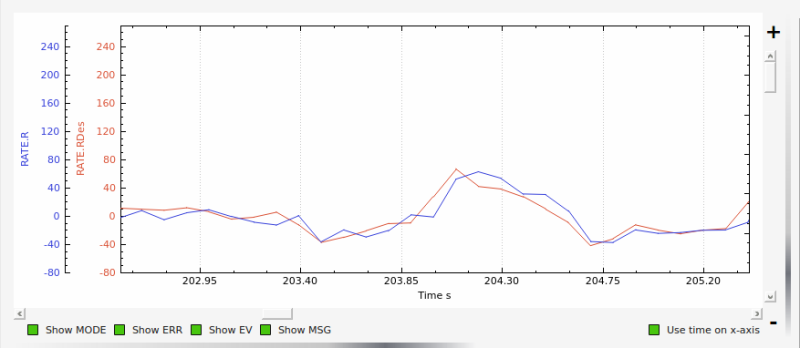
In both pitch and roll axes, the VFF gain is set so that the actual aircraft rate matches the desired rate. To do this, the RATE message in the log is required to compare the P.des and P signals for pitch and the R.des and R signals for roll. With the VFF gains set to 0.15, takeoff and establish a hover in Stabilize flight mode, then make some sharp stick inputs in both pitch and roll. Land and pull the log from the microSD card and look at the signals in your ground station software. If the actual rate is more than the desired rate then you’ll want to decrease VFF. If it is less, increase VFF. If the desired and actual rates are offset by some amount it means that your swash was not properly leveled in the setup or the CG is not right. In this case, just make sure the change in rate is similar between desired and actual. If you get the rates to match and they feel like they are too fast, then reduce the ATC_ACCEL_MAX parameter and repeat the process above to match the desired and actual rates.
If while tuning the VFF gain the aircraft starts to oscillate, reduce the ATC_ANG_xxx_P gain for that axis until the oscillations stop. However for most helicopters the suggested values above should not cause this problem.
With a flybar head, where the linkage rate is normally lower, it is recommended to start with 0.22 VFF for both pitch and roll and you will likely have to go higher with VFF. But for a flybarless head, VFF shouldn’t be more than 0.22 unless you have really really slow servos or slow linkage rate. With all helicopters, the VFF gain compensates for differences in servo and linkage speed.
The final setting for ATC_ACCEL_MAX parameters will depend on the size of the helicopter. Large 800-900 class machines will typically be in the 36000-52000 range; smaller 450-500 class machines will typically be in the 90000-110000 range. You may want to experiment with the ATC_INPUT_TC parameter as well to get the initial aircraft response the way you like it. It is recommended to keep the ATC_INPUT_TC parameter between 0.15 and 0.25 (for RC_FEEL with AC 3.5 or earlier, the recommended range was 25 to 50). Once this process is complete, the aircraft should have the desired feel in snappiness and rate.
Below is a graph showing an example of Rate Roll Desired vs actual Rate Roll. The peak corresponds to a rapid stick input and the amplitude (height) of the peaks should be approximately the same with no more than 100 milliseconds offset.
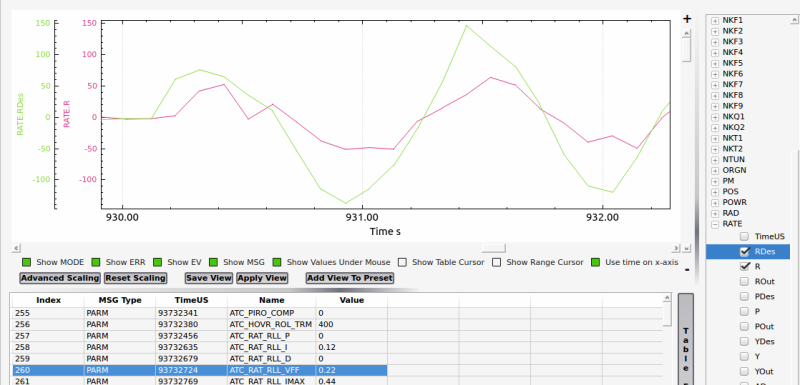
Note on Tuning Flybar Helicopers - for flybar heads the flybar is a mechanical version of the rate PID loop. So flybar is tuned using only VFF in pitch and roll. The rate D and P gains mentioned in the next topic below are left set to zero for flybar. I-gain, IMAX, and ILMI are tuned just like FBL. Below is a plot of beginning a tune on a flybar helicopter using the starting setting of ATC_RAT_RLL_VFF = 0.22. The graph shows the aircraft’s response to the rate request of the attitude controller is low, meaning the VFF value must be increased to achieve proper rate response. For all flybar helicopters be sure to set H_FLYBAR_MODE = 1
Tuning the D and P gain¶
Once you have the heli responding nicely with the rate VFF gain, now tune the PID gains. The rate PID controller provides stability to reject disturbances and keep the actual aircraft following the software predicted rates.
Start with the D gain. Use the tuning feature of ArduCopter which is linked to channel 6 on your radio. Make the following parameter changes.
| TUNING | 21 |
| TUNING_LOW | 0 |
| TUNING_HIGH | 30* |
for futaba radios this equates to one increment in the knob to 0.001
Adjust the tuning knob until the ATC_RAT_RLL_D and ATC_RAT_PIT_D gains are 0.001. Lift into a hover and make some sharp stick inputs in roll. Most helicopters will see roll oscillations before they see pitch oscillations. That is why roll inputs are suggested. If it doesn’t shake, increase the gain by 0.001 and try it again. At the value where you get the rapid shaking, cut that value in half and enter it as the final tuning value for ATC_RAT_RLL_D and ATC_RAT_PIT_D. Test hover the heli and make some rapid stick movements in both pitch and roll to make sure it’s stable.
Now tune the P gains. Make the following tuning parameter changes.
| TUNING | 4 |
| TUNING_LOW | 0 |
| TUNING_HIGH | 300* |
for futaba radios this equates to one increment in the knob to 0.01
Adjust the tuning knob until the ATC_RAT_RLL_P and ATC_RAT_PIT_P gains are 0.05. Lift into a hover and roll aggressively from side to side. If it doesn’t shake, increase the gain by 0.01 and try it again. At the value where you get the rapid shaking, cut that value in half and enter it as the final tuning value for ATC_RAT_RLL_P and ATC_RAT_PIT_P. Test hover the heli and make some rapid stick movements in both pitch and roll to make sure it’s stable.
After tuning the P and D gain the aircraft should feel much smoother.
Setting the I gain, IMAX, and ILMI¶
It is recommended to set the ATC_RAT_PIT_I gain equal to the ATC_RAT_PIT_VFF gain and the ATC_RAT_RLL_I gain equal to the ATC_RAT_RLL_VFF gain. The IMAX value limits amount of integrator error that can be stored to counter large disturbances in attitude. In the pitch axis this is set by the integrator error required to hold the aircraft attitude at high forward speeds. The starting value is 0.4. To check this set the value to IMAX = 1, fly the aircraft at the maximum desired speed. Pull the log and look at what the maximum I value is in the PIDP message. Set IMAX for 0.1 above the maximum value. You could do the same for the roll axis but typically 0.4 should be sufficient. ILMI is set for the maximum amount of integrator that you want to retain in a hover to help maintain attitude. It is recommended that this value is no larger than 0.1
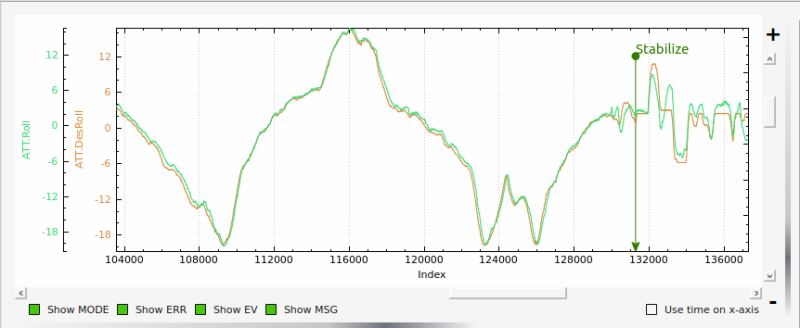
Below is a graph of desired roll attitude vs actual roll attitude for a helicopter in high-speed autonomous flight with the ILMI parameters set to zero. The effect of the I-gain and IMAX parameters, properly set, will make the helicopter track the desired attitude very closely at speed exceeding 5m/s for more than 2 seconds (what we call “dynamic flight”). It should be within 1-2 degrees of desired in dynamic flight. Towards the right side of the graph the helicopter came to a stop in hover and the pilot switched to Stabilize flight mode. You will notice a discrepancy between the actual and desired roll attitude at that point. This is the effect of having ILMI set to zero. The ILMI can be considered to be a sort of “auto trim” for hover that will reduce the discrepancy between desired and actual pitch and roll attitude when the helicopter is not in dynamic flight.
Advanced Tuning for Hover Trim, Loiter Flight Mode and Waypoint Flying¶
At this point you should have a helicopter that is responsive and yet stable. But we need to trim the helicopter so it hovers pretty much hands-off in Stabilize flight mode. And adjust the I-gains for Auto flight mode so it tracks attitude properly under full autopilot control.
Hover Trim¶
Trimming the helicopter in pitch and roll axes is an important step to keep the aircraft from drifting in modes like Stabilize and Althold. The trim attitude in the roll axis is affected by the tail rotor thrust. All conventional single- rotor helicopters with a torque-compensating tail rotor hover either right skid low or left skid low, depending on which way the main rotor turns. The ArduCopter software has a parameter, ATC_HOVR_RLL_TRIM, to compensate for this phenomenon. Longitudinal CG location will affect the trim attitude in the pitch axis. There is no parameter to tell the flight controller what pitch attitude the aircraft hovers with no drift. It always targets zero deg pitch as measured by the flight controller. Therefore the actual pitch attitude the aircraft hovers may be 5 deg nose high but the flight controller AHRS Trim value is set to make it think the attitude is zero deg.
In order to trim the aircraft, set the ATC_HOVR_RLL_TRIM parameter to zero. During the initial setup of the flight controller, the AHRS_TRIM values are set during the accelerometer calibration on the last step that has you level the aircraft. For that step you should have made certain that the shaft was perfectly straight up in pitch and roll. For this trim procedure, it is recommended that you check it and using the method below.
Measure the actual frame angle (on a portion of the frame that is perpendicular to the mainshaft) in pitch and roll with your digital pitch gauge. Connected to your ground station software with MavLink, note the pitch and roll angle the flight controller is “seeing”. Adjust the AHRS_TRIM_X and AHRS_TRIM_Y values so the flight controller “sees” the identical frame angle you measured with the digital pitch gauge. You can use the Level Horizon function in your ground station to level the horizon with the helicopter at actual level. That function will make the adjustments to the AHRS_TRIM’s for you.
The above is necessary so we can accurately measure the roll angle to set the ATC_HOVR_RLL_TRIM. The flight controller now “knows” when the mainshaft is perfectly vertical.
Load the helicopter with its normal payload, and hover the helicopter in no-wind conditions in Stabilize flight mode. Land it and pull the log, noting the roll angle that you had to hold with the stick to keep the helicopter from drifting. Enter this value in the ATC_HOVR_RLL_TRIM parameter in centidegrees. For a CW turning main rotor if it took 3.5 degrees of right roll to compensate, enter 350. Negative values are for a CCW turning main rotor that requires left roll to compensate.
Important Note - do not use the radio trims at all. Make sure they are centered.
After setting the ATC_HOVR_RLL_TRIM now hover the helicopter again. If it still drifts make small adjustments to the SERVO1_TRIM, SERVO2_TRIM and SERVO3_TRIM. The chances of getting the swashplate perfectly level during bench setup is very low and this dynamic tuning is needed to trim the helicopter. If it requires large deviation from your original SERVOx_TRIM values it is likely you have a CG problem, or your initial setup when leveling the swashplate was not very accurate.
Your helicopter is now trimmed properly. This trimming procedure makes the difference between a helicopter that is difficult to handle vs one that flies with true scale quality and handling.
Adjusting I-gains For High-Speed Autonomous Flight¶
Prepare a mission with your ground station software that will fly the helicopter, preferably in a figure-8 pattern to make both right and left turns, at a speed of 6 m/s. Fly the helicopter on this mission, pull the logs from the microSD card and look at the AHRS desired vs actual pitch, roll and yaw attitudes in dynamic flight. They should track within 1-2 degrees. If they do not, increase the ATC_RAT_xxx_I value for that axis until they do.
Now, fly the same mission, but at higher speed of 9-10 m/s, and analyze the logs the same way. Make further adjustments to the I-gains and IMAX values as required. It is not clear what I-gain values will be required as no two helicopters are the same. But I-gain values from 0.25 - 0.38 are common in pitch and roll, and 0.18 - 0.30 in yaw. IMAX values of 0.40 - 0.45 are common, however refer to the ‘Setting the I gain, IMAX, and ILMI’ section on how to determine what the IMAX value should be.